




视觉传感器分类-视觉传感器分为哪几种
发布时间:2021-09-15
觉传感技术在机器人焊接中的研究现状随着科学技术的发展,焊接视觉传感器以其非接触、精度高、抗干扰能力强等优势在机器人焊接领域得到了广泛使用。根据测量光源的差异,视觉测量技术又可分为被动视觉法和主动视觉法。
1)被动视觉
被动视觉通常以自然光或焊接弧光为光源,其可以直接得到焊接区域的图像,信 息获取量大,然而强烈的噪声干扰,如烟雾和弧光飞溅等,给后期的图像处理带来了巨 大挑战。但其获取的信息同步性好,不存在滞后性,因此可用于采集熔池图像,得到熔 池特征与焊接参数、焊接质量的关系,使焊接过程具有实时调整的能力。 文献[22]以铝合金 GTAW 为研究对象,将电弧传感器和视觉传感器结合起来,对焊 缝进行实时定位跟踪,跟踪精度可达 0.4mm。针对脉冲 MAG 焊接,文献[23]研制的视 觉引导焊接系统通过对熔池图像和焊接偏差的分析,建立了两者的关系模型,实现了 二维直线、曲线以及三维折线的焊缝识别和跟踪。
2)主动视觉
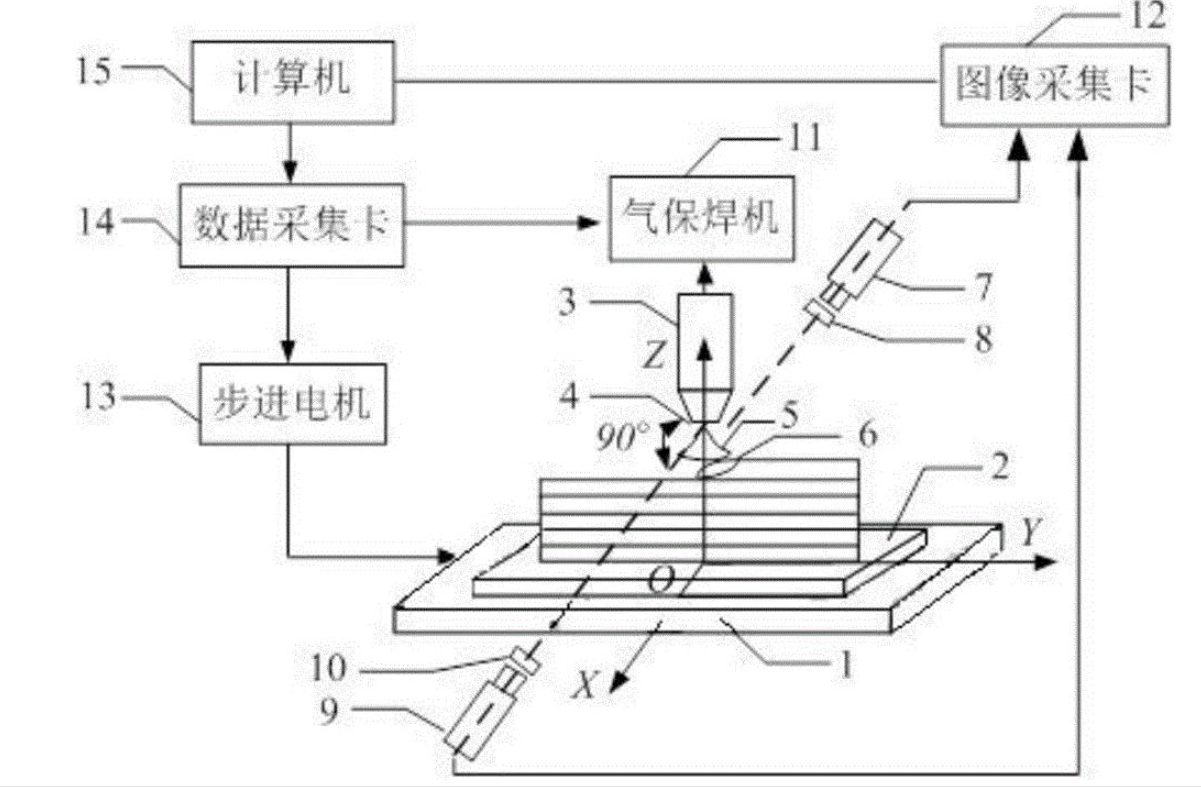
主动视觉通常以结构光作为测量光源,将其投射到测量物体表面,CCD 相机拍摄 物体表面图像并进行分析,从而获取工件几何结构特征。根据测量所用光源的不同,主 动视觉法又可分为激光法测量和结构光法测量,激光法是以激光作为扫描光源,结 构光法则以条纹或散斑等结构光作为扫描光源。近年来,整体体积较小的基于结构光 测量的视觉传感器获得了广泛应用。
上一篇:焊接视觉技术国内外研究现状
下一篇:视觉传感器在工业中的作用-焊接自动化
热门资讯
最新资讯
-

官方微信
-

官方B站